You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
**Note:** The RTK Express Plus does not support Base mode. The Express Press contains an internal IMU and additional algorithms to support highprecision location fixes using dead reckoning.
5
+
**Note:** The RTK Express Plus does not support Base mode. The Express Press contains an internal IMU and additional algorithms to support high-precision location fixes using dead reckoning.
6
6
7
7
**Note:** The RTK Facet L-Band is designed to use corrections provided via u-blox's PointPerfect system therefore, a Base/Rover setup is not needed. However, if the service is not available the RTK Facet L-Band can still be used in a traditional Base/Rover setup. Here we’ll describe how to assemble a Rover and Base.
8
8
9
-
In addition to providing accurate local location fixes, the SparkFun RTK devices can also serve as a correction source, also called a *Base*. The Base doesn't move and 'knows' where it is so it can calculate the discrepancies between the signals it is receiving and what it should be receiving. Said differently, the 'Base' is told where it is, and that it's not moving. If the GPS signals say otherwise, the Base knows there was a disturbance in the ~~Force~~ ionosphere. These differences are the correction values passed to the Rover so that the Rover can have millimeterlevel accuracy.
9
+
In addition to providing accurate local location fixes, the SparkFun RTK devices can also serve as a correction source, also called a *Base*. The Base doesn't move and 'knows' where it is so it can calculate the discrepancies between the signals it is receiving and what it should be receiving. Said differently, the 'Base' is told where it is, and that it's not moving. If the GPS signals say otherwise, the Base knows there was a disturbance in the ~~Force~~ ionosphere. These differences are the correction values passed to the Rover so that the Rover can have millimeter-level accuracy.
10
10
11
-
There are two types of bases: *Surveyed* and *Fixed*. A surveyed base is often a temporary base setup in the field. Called a 'Survey-In', this is less accurate but requires only 60 seconds to complete. The 'Fixed' base is much more accurate but the precise location at which the antenna is located must be known. A fixed base is often a structure with an antenna bolted to the side. Raw satellite signals are gathered for a few hours then processed using Precision Point Position. We have a variety of tutorials that go into depth on these subjects but all you need to know is that the RTK Facet supports both Survey-In and Fixed Base techniques.
11
+
There are two types of bases: *Surveyed* and *Fixed*. A surveyed base is often a temporary base set up in the field. Called a 'Survey-In', this is less accurate but requires only 60 seconds to complete. The 'Fixed' base is much more accurate but the precise location at which the antenna is located must be known. A fixed base is often a structure with an antenna bolted to the side. Raw satellite signals are gathered for a few hours and then processed using Precision Point Position. We have a variety of tutorials that go into depth on these subjects but all you need to know is that the RTK Facet supports both Survey-In and Fixed Base techniques.
12
12
13
13
Please see the following tutorials for more information:
14
14
@@ -34,15 +34,15 @@ The Base Menu allows the user to select between Survey-In or Fixed Base setups.
34
34
35
35
*Controlling the type of Base from WiFi AP Config*
36
36
37
-
[](https://cdn.sparkfun.com/assets/learn_tutorials/1/8/5/7/SparkFun_RTK_Express_-_Base_Menu.jpg)
37
+
[](https://cdn.sparkfun.com/assets/learn_tutorials/1/8/5/7/SparkFun_RTK_Express_-_Base_Menu.jpg)
38
38
39
39
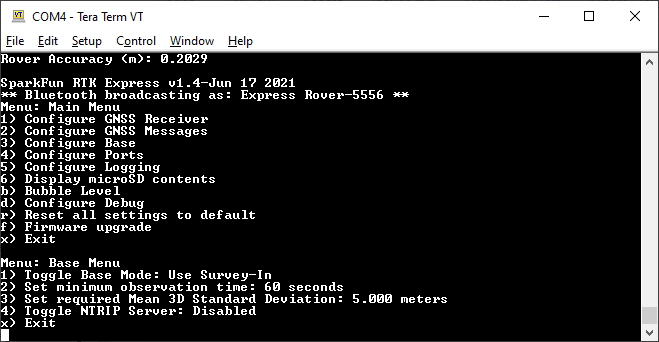
*Base Menu Options*
40
40
41
41
## Mode
42
42
43
-
In **Survey-In** mode, the minimum observation time and Mean 3D Standard Deviation can be set. The defaults are 60s and 5m as directed by u-blox. The device will wait for the position accuracy to be better than 1 meter before a Survey-In is started. Don't be fooled; setting the observation time to 4 hours or an initial positional accuracy of 0.3m is not going to significantly improve the accuracy of the survey - use [PPP](https://learn.sparkfun.com/tutorials/how-to-build-a-diy-gnss-reference-station#gather-raw-gnss-data) instead.
43
+
In **Survey-In** mode, the minimum observation time and Mean 3D Standard Deviation can be set. The defaults are 60 seconds and 5 meters as directed by u-blox. The device will wait for the position accuracy to be better than 1 meter before a Survey-In is started. Don't be fooled; setting the observation time to 4 hours or an initial positional accuracy of 0.3m is not going to significantly improve the accuracy of the survey - use [PPP](https://learn.sparkfun.com/tutorials/how-to-build-a-diy-gnss-reference-station#gather-raw-gnss-data) instead.
44
44
45
-
In **Fixed** mode, the coordinates of the antenna need to be sent. These can be entered in ECEF or Geographic coordinates. Whenever a user enters Base mode by pressing the SETUP button the GNSS receiver will immediately go into base mode with these coordinates and immediately begin outputting RTCM correction data.
45
+
In **Fixed** mode, the coordinates of the antenna need to be sent. These can be entered in ECEF or Geographic coordinates. Whenever a user enters Base mode by pressing the SETUP button the GNSS receiver will immediately go into Base mode with these coordinates and immediately begin outputting RTCM correction data.
46
46
47
47
[](https://cdn.sparkfun.com/assets/learn_tutorials/1/8/5/7/SparkFun_RTK_Express_-_Display_-_Survey-In.jpg)
48
48
@@ -54,7 +54,7 @@ Once the device has been configured, pressing the Setup button will change the d
54
54
55
55
*RTK Facet in Fixed Transmit Mode*
56
56
57
-
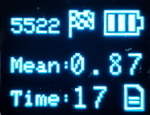
Once the *survey-in* is complete the device enters RTCM Transmit mode. The number of RTCM transmissions is displayed. By default this is one per second. During this phase the ZED-F9P is outputting the RTCM corrections out the **RADIO** port. Attaching an external serial radio to this port will allow the Base to send corrections to any Rover.
57
+
Once the *survey-in* is complete the device enters RTCM Transmit mode. The number of RTCM transmissions is displayed. By default, this is one per second. During this phase, the ZED-F9P is outputting the RTCM corrections out of the **RADIO** port. Attaching an external serial radio to this port will allow the Base to send corrections to any Rover.
58
58
59
59
The *Fixed Base* mode is similar but uses a structure icon (shown above) to indicate a fixed base.
60
60
@@ -72,7 +72,7 @@ Enabling NTRIP will present a handful of new options seen below:
72
72
73
73
*Settings for the NTRIP Server*
74
74
75
-
This is a powerful feature of the RTK line of products. The RTK device can be configured to transmit its RTCM directly over WiFi to the user's mountpoint. This eliminates the need for a radio link.
75
+
This is a powerful feature of the RTK line of products. The RTK device can be configured to transmit its RTCM directly over WiFi to the user's mount point. This eliminates the need for a radio link.
76
76
77
77
Once the NTRIP server is enabled you will need a handful of credentials:
78
78
@@ -100,4 +100,4 @@ Note: During NTRIP transmission WiFi is turned on and Bluetooth is turned off. Y
100
100
101
101
## L-Band Assisted Base
102
102
103
-
The RTK Facet L-Band can be setup as a relay: the L-Band device can be located in a good reception area, and then transmit very accurate corrections to a rover via Radio or internet link. To setup an assisted base, set up RTK Facet L-Band unit with a clear view of the sky, and let it obtain RTK Fix from a fixed position in *Rover* mode. Once RTK fix is achieved, change the device to temporary *Base* mode. The device will take 60 seconds of positional readings, at which point the fixed position will be set using RTK fixed coordinates. The RTK Facet L-Band will then output very accurate RTCM corrections that can relayed to a rover that is in a less optimal reception setting.
103
+
The RTK Facet L-Band can be set up as a relay: the L-Band device can be located in a good reception area, and then transmit very accurate corrections to a rover via Radio or internet link. To set up an assisted base, set up an RTK Facet L-Band unit with a clear view of the sky, and let it obtain RTK Fix from a fixed position in *Rover* mode. Once an RTK fix is achieved, change the device to temporary *Base* mode. The device will take 60 seconds of positional readings, at which point the fixed position will be set using RTK fixed coordinates. The RTK Facet L-Band will then output very accurate RTCM corrections that can be relayed to a rover that is in a less optimal reception setting.
Copy file name to clipboardExpand all lines: docs/configure_data_logging.md
+3-3Lines changed: 3 additions & 3 deletions
Original file line number
Diff line number
Diff line change
@@ -16,7 +16,7 @@ If a microSD card is detected, all messages will be logged.
16
16
17
17
### Max Log Time
18
18
19
-
Once the max log time is achieved, logging will cease. This is useful for limiting longterm, overnight, static surveys to a certain length of time. Default: 1440 minutes (24 hours). Limit: 1 to 2880 minutes.
19
+
Once the max log time is achieved, logging will cease. This is useful for limiting long-term, overnight, static surveys to a certain length of time. Default: 1440 minutes (24 hours). Limit: 1 to 2880 minutes.
20
20
21
21
### Max Log Length
22
22
@@ -32,7 +32,7 @@ Various stats for the SD card are shown.
32
32
33
33
### Update Firmware
34
34
35
-
New firmware may be uploaded via WiFi to the unit. See [Updateing Firmware from the SD Card](https://sparkfun.github.io/SparkFun_RTK_Firmware/firmware_update/#updating-firmware-from-the-sd-card) for more information.
35
+
New firmware may be uploaded via WiFi to the unit. See [Updating Firmware from the SD Card](https://sparkfun.github.io/SparkFun_RTK_Firmware/firmware_update/#updating-firmware-from-the-sd-card) for more information.
36
36
37
37
### Reset Counter
38
38
@@ -50,4 +50,4 @@ From the Main Menu, pressing 5 will enter the Logging Menu. This menu will repor
50
50
* Option 2 allows a user to set the max logging time. This is convenient to determine the location of a fixed antenna or a receiver on a repeatable landmark. Set the RTK Facet to log RAWX data for 10 hours, convert to RINEX, run through an observation processing station and you’ll get the corrected position with <10mm accuracy. Please see the [How to Build a DIY GNSS Reference Station](https://learn.sparkfun.com/tutorials/how-to-build-a-diy-gnss-reference-station) tutorial for more information.
51
51
* Option 3 allows a user to set the max logging length in minutes. Every 'max long length' amount of time the current log will be closed and a new log will be started. This is known as cyclic logging and is convenient on *very* long surveys (ie, months or years) to prevent logs from getting too unwieldy and helps limit the risk of log corruption. This will continue until the unit is powered down or the *max logging time* is reached.
52
52
53
-
**Note:** If you are wanting to log RAWX sentences to create RINEX files useful for postprocessing the position of the receiver please see the GNSS Configuration Menu. For more information on how to use a RAWX GNSS log to get higher accuracy base location please see the [How to Build a DIY GNSS Reference Station](https://learn.sparkfun.com/tutorials/how-to-build-a-diy-gnss-reference-station#gather-raw-gnss-data) tutorial.
53
+
**Note:** If you are wanting to log RAWX sentences to create RINEX files useful for post-processing the position of the receiver please see the GNSS Configuration Menu. For more information on how to use a RAWX GNSS log to get a higher accuracy base location please see the [How to Build a DIY GNSS Reference Station](https://learn.sparkfun.com/tutorials/how-to-build-a-diy-gnss-reference-station#gather-raw-gnss-data) tutorial.
Note: When in **Base** mode, measurement frequency is set to 1Hz. This is because RTK transmission does not benefit from faster updates, nor does logging of RAWX for PPP.
25
+
Note: When in **Base** mode, the measurement frequency is set to 1Hz. This is because RTK transmission does not benefit from faster updates, nor does logging of RAWX for PPP.
26
26
27
27
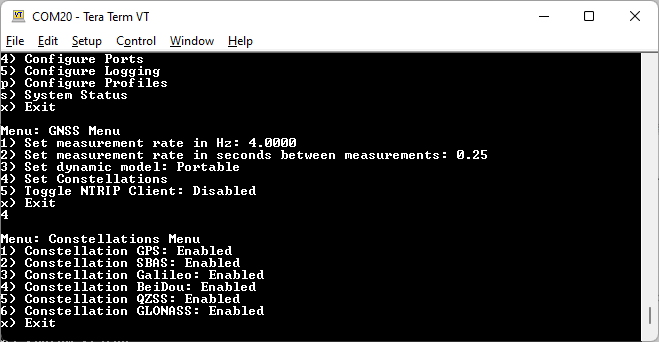
## Dynamic Model
28
28
29
-
The Dynamic Model can be changed but it is recommended to leave as *Portable*. For more information, please refer to the [ZED-F9P Integration Manual](https://cdn.sparkfun.com/assets/learn_tutorials/1/8/5/7/ZED-F9P_IntegrationManual__UBX-18010802_.pdf).
29
+
The Dynamic Model can be changed but it is recommended to leave it as *Portable*. For more information, please refer to the [ZED-F9P Integration Manual](https://cdn.sparkfun.com/assets/learn_tutorials/1/8/5/7/ZED-F9P_IntegrationManual__UBX-18010802_.pdf).
30
30
31
31
## Constellations Menu
32
32
33
33
[](https://cdn.sparkfun.com/assets/learn_tutorials/2/1/8/8/SparkFun_RTK_ExpressPlus_Receiver_Constellations.jpg)
34
34
35
35
*Enable or disable the constellations used for fixes*
36
36
37
-
The ZED-F9P is capable of tracking 184 channels across four constellations and two bands (L1/L2) including GPS (USA), Galileo (EU), BeiDou (China), and GLONASS (Russia). SBAS (satellite-based augmentation system) is also supported. By fault, all constellations are used. Some users may want to study, log, or monitor a subset. Disabling a constellation will cause the ZED to ignore those signals when calculating a location fix.
37
+
The ZED-F9P is capable of tracking 184 channels across four constellations and two bands (L1/L2) including GPS (USA), Galileo (EU), BeiDou (China), and GLONASS (Russia). SBAS (satellite-based augmentation system) is also supported. By default, all constellations are used. Some users may want to study, log, or monitor a subset. Disabling a constellation will cause the ZED to ignore those signals when calculating a location fix.
38
38
39
39
## NTRIP Client
40
40
@@ -54,7 +54,7 @@ Once the NTRIP Client is enabled you will need a handful of credentials:
54
54
* A casting service and port such as [RTK2Go](http://rtk2go.com/) or [Emlid](https://emlid.com/ntrip-caster/) (the port is almost always 2101)
55
55
* A mount point and password
56
56
57
-
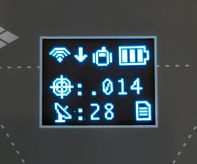
With these credentials set, RTK device will attempt to connect to WiFi, then connect to your caster of choice, and then begin downloading the RTCM data over WiFi. We tried to make it as easy as possible. Every second a few hundred bytes, up to ~2k, will be downloaded from the mount point you've entered. Remember, the rover must be in WiFi range to connect in this mode.
57
+
With these credentials set, the RTK device will attempt to connect to WiFi, then connect to your caster of choice, and then begin downloading the RTCM data over WiFi. We tried to make it as easy as possible. Every second a few hundred bytes, up to ~2k, will be downloaded from the mount point you've entered. Remember, the rover must be in WiFi range to connect in this mode.
58
58
59
59
[](https://cdn.sparkfun.com/assets/learn_tutorials/2/1/8/8/SparkFun_RTK_Rover_NTRIP_Client_Connection.png)
From this menu a user can control the output of various NMEA, RTCM, RXM, and other messages. Any enabled message will be broadcast over Bluetooth *and* recorded to SD (if available).
13
+
From this menu, a user can control the output of various NMEA, RTCM, RXM, and other messages. Any enabled message will be broadcast over Bluetooth *and* recorded to SD (if available).
14
14
15
15
Because of the large number of configurations possible, we provide a few common settings:
16
16
@@ -41,11 +41,11 @@ These seven sentences are commonly used when logging and doing Precise Point Pos
41
41
42
42
*Configuring the NMEA messages*
43
43
44
-
As mentioned is the microSD section of the [Hardware Overview](https://sparkfun.github.io/SparkFun_RTK_Firmware/hardware_rtk_facet/#microsd) there are a large number of messages supported. Each message submenu will present the user with the ability to set the message report rate.
44
+
As mentioned in the microSD section of the [Hardware Overview](https://sparkfun.github.io/SparkFun_RTK_Firmware/hardware_rtk_facet/#microsd) there are a large number of messages supported. Each message sub-menu will present the user with the ability to set the message report rate.
45
45
46
46
Each message rate input controls which messages are disabled (0) and how often the message is reported (1 = one message reported per 1 fix, 5 = one report every 5 fixes). The message rate range is 0 to 20.
47
47
48
-
**Note:** The message report rate is the *number of fixes* between message reports. In the image above, with GSV set to 4, the NMEA GSV message will be produced once every 4 fixes. Because the device defaults to 4Hz fix rate, the GSV message will appear once per second.
48
+
**Note:** The message report rate is the *number of fixes* between message reports. In the image above, with GSV set to 4, the NMEA GSV message will be produced once every 4 fixes. Because the device defaults to a 4Hz fix rate, the GSV message will appear once per second.
0 commit comments