Official implementation of our paper: "Rectified Point Flow: Generic Point Cloud Pose Estimation".
Tao Sun *,1, Liyuan Zhu *,1, Shengyu Huang2, Shuran Song1, Iro Armeni1
1Stanford University, 2NVIDIA Research | * denotes equal contribution
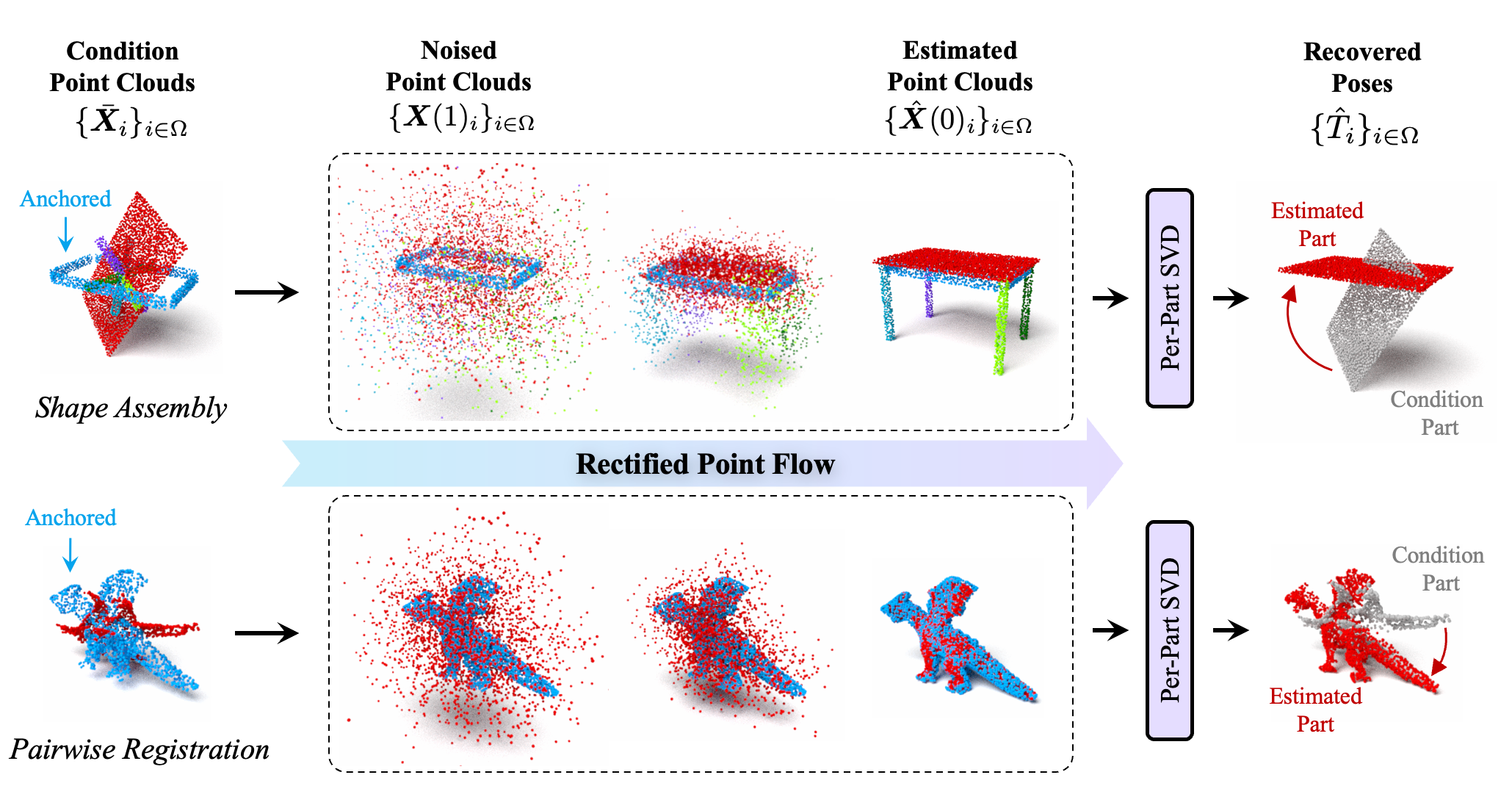
We introduce Rectified Point Flow, a unified parameterization that formulates pairwise point cloud registration and multi-part shape assembly as a single conditional generative problem. Given unposed point clouds, our method learns a continuous point-wise velocity field that transports noisy points toward their target positions, from which part poses are recovered. In contrast to prior work that regresses part-wise poses with ad-hoc symmetry handling, our method intrinsically learns assembly symmetries without symmetry labels.
We plan to release the code in June 2025. Thank you for your patience.
@inproceedings{sun2025_rpf,
author = {Sun, Tao and Zhu, Liyuan and Huang, Shengyu and Song, Shuran and Armeni, Iro},
title = {Rectified Point Flow: Generic Point Cloud Pose Estimation},
booktitle = {arxiv preprint arXiv:2506.05282},
year = {2025},
}